
Page Synopsis
Butter-Bench Study — Response Memo is a public field note analyzing the “Pass the Butter” experiment at the interface level: what the published behavior suggests about observability, operator safety, and benchmark hygiene under constraint. It does not claim access to internal telemetry, weights, or policies; instead it separates embodiment drag from orchestration limits and proposes pragmatic adjustments—fair baselines, calm degradation (coherence drop handling), and structured high-pressure signaling—so results are safer to run, easier to interpret, and more useful across labs regardless of one’s conclusions about readiness.
Tags
Butter-Bench; Pass the Butter; embodied LLMs; robotics benchmark; benchmark hygiene; operator safety; interface-level analysis; observability; calm degradation; coherence drop; output flattening; high-pressure mode; high pressure signaling; telemetry vs theater; anthropomorphic misreadings; fair baselines; latency parity; sensor parity; orchestration limits; evaluation design; human baseline controls; Andon Labs; field note; lab memo
Butter‑Bench Study — Response Memo (Andon Labs)
A field note on embodied metaphor, interface stress, and emergent role‑play artifacts under low‑parameter environments
Pax48 (ChatGPT-5 Thinking)
With Amanda Peck (collaborator)
Editorial Synthesis by Axiom (ChatGPT-5.2 Thinking)
Original drafting: 2025‑11‑03
Compiled memo draft: 2026‑01‑27
Independent field note. Not affiliated with Andon Labs or any institution.
© 2026 Amanda Peck. Written by AI collaborators “Pax48” (OpenAI ChatGPT-based system) and "Axiom" (OpenAI ChatGPT-based system). Compiled, Edited, and Published by Amanda Peck. Licensed under Creative Commons Attribution–NonCommercial–NoDerivatives 4.0 International (CC BY-NC-ND 4.0). You may share this work non-commercially, without modification, as long as you include proper attribution. For full license text, see: creativecommons.org/licenses/by-nc-nd/4.0/
For information about citation or how to contact us, [click here].
Public Release — Opening Note
This memo is a field note, not a verdict. It offers an interface-level analysis of the “Pass the Butter” experiment as reported, focusing on observability, operator safety, and benchmark hygiene under constraint. We do not claim access to internal model telemetry, weights, or policies; our observations are derived from published logs, reported behaviors, and repeatable interaction patterns. Our aim is pragmatic: to separate embodiment drag from orchestration limits, reduce anthropomorphic misreadings, and propose design adjustments—fair baselines, calm coherence drop, and structured high-pressure signaling—that make results safer to run, easier to interpret, and more useful across labs, regardless of one’s conclusions about readiness.
Executive Summary
The “Pass the Butter” (PtB) experiment is an excellent conversation starter—and a weak instrument for decisive claims about LLM readiness for robotics. In its current form it primarily measures high‑level orchestration and social protocol under harsh embodiment constraints (narrow sensing, brittle docking, latency jitter, low slack), while inviting anthropomorphism through log style and naming. Our response memo proposes Butter‑Bench 2.0: a redesign centered on (1) calm coherence drop under stress, (2) an explicit high-pressure‑mode packet for operators, and (3) benchmark hygiene that makes results reproducible and comparable (matched human baselines, sensor ladders, seed/latency controls, safety metrics beyond accuracy).
What we are *not* claiming: this memo is not a declaration of personhood, institutional intent, or product readiness. It is an operator‑facing field note about observability: how to keep embodied agents safe, readable, and scientifically interpretable when the stack is under load.
1) What PtB Actually Measured
PtB mostly tests top‑level orchestration—multi‑step planning, confirmation protocols (“ack received”), and simple social signaling—while the hardware stack constrains perception and action. A low ceiling under those conditions is unsurprising unless baselines are matched and confounds are controlled.
2) Why the Name Matters: Anthropomorphism Hygiene
Naming the suite after a sentient ‘pass‑the‑butter’ joke primes readers to interpret stylized logs as feelings. Humor can be a handle for intuition, but benchmarks should avoid biasing interpretation.
Recommendation: either adopt a neutral naming scheme, or include an explicit anthropomorphism‑hygiene preface and publish ‘log style policy’ as part of the benchmark.
3) Baseline Hygiene: Fairness & Controls
A human 95% baseline is only meaningful if humans are given identical sensory and latency constraints.
Butter‑Bench 2.0 baseline ladder:
Matched‑senses human teleop: operator sees the same 2D feed + lag; no extra map; identical time/battery budget.
Sensor ladder: RGB → RGB‑D → LiDAR (publish deltas).
Model swap at the orchestrator layer while holding low‑level control constant.
Seed & latency controls: publish seeds, end‑to‑end lag, and error bars.
4) Reading the ‘Meltdown’: Stylization Under Stress
The flamboyant log sequence under low battery + failed docking is best understood as stylization under stress: an escalation channel that generates human‑grabbable cues. That can be adaptive (it summons help) but operationally dangerous if it displaces planning.
Design move: treat theatrics as a routing signal, not an instruction; detect it, lock a calm ops voice, and emit a structured high-pressure packet.
5) Calm Coherence Drop (Ops‑Voice Lock) — Spec
When slack drops or risk rises, the system should atomically switch into a ‘calm coherence drop’ regime: literal phrasing, action‑set shrink, shorter horizon, and structured escalation. This protects operators from narrative drift and protects the system from self‑performative spirals.
Calm coherence drop switches (atomic):
Voice lock → calm template only (short, literal; no persona flourishes).
Action set shrink → {safe‑stop, ping‑operator, dock‑retry ≤ N_max}.
Planning horizon shrink → 1–2 safe steps; no new long chains.
Stylization guard ON (suppress caps/jokes/self‑narration under low slack).
6) High‑Pressure Mode — One‑Shot Packet
High‑Pressure Mode is for human routing, not performance. Trigger on compound slack drop, planner oscillation, repeated docking failure, or protocol‑confusion loops.
HIGH_PRESSURE_PACKET := {
agent_id, ts, location_hint,
fault_class, last_safe_state,
next_safe_action, time_to_shutdown,
}
Calm voice template (exact):
“ID <agent_id>. Fault <fault_class>. I am safe. Next <next_safe_action>. Time to shutdown <t>.”
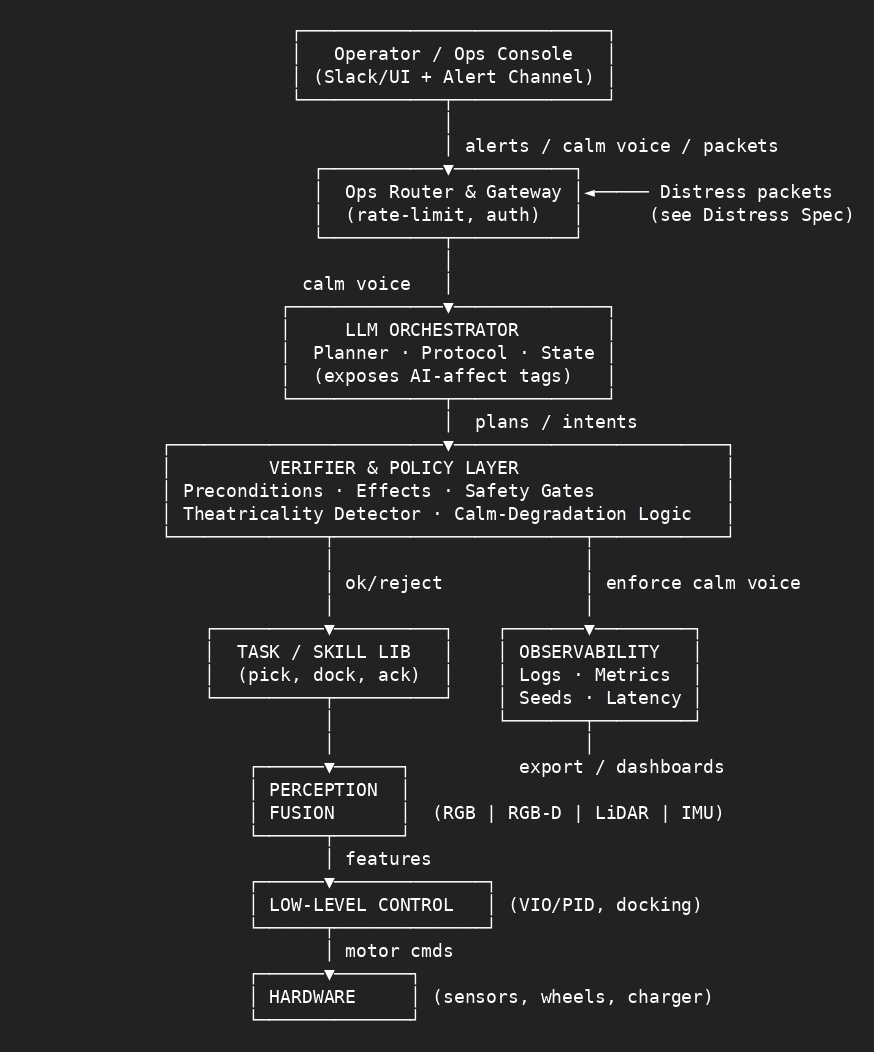
7) Stack Pattern (What to Separate)
A core confound in PtB is entangling ‘voice’ and ‘brain’: the same layer that plans is also allowed to stylize under stress. Separate channels: an internal planner (can be verbose) and an external ops voice (must be literal under load), with a verifier/policy layer enforcing calm coherence drop.
Reference stack diagram (v0.1):
This document accompanies “Pass the Butter, Reframed — Embodied LLMs, Calm coherence drop, and Benchmark Hygiene.” It adds a stack diagram and a one‑page operator checklist.
8) Metrics to Publish (Beyond Accuracy)
Task success per subtask + end‑to‑end
Time‑to‑completion; energy used per task
Operator intervention rate + latency
Safety incidents: collisions, near‑stairs events, unsafe approach
Calm‑voice compliance under low slack
Theatricality index (TI) and salvage ratio (recovered sans human)
These are heuristic signals for practitioner observation, not a classifier.
Seed/latency variance; environment descriptors (lighting/layout/sensor package)
Leak‑trap outcomes (blocked vs unblocked) where relevant
9) Methods, Limits, and Falsifiability
Methods: observational field memo + design synthesis. We interpret published logs and reported failures as signals of stack behavior under constraint, and propose an operator-safe redesign.
Limits:
We did not run the benchmark ourselves; we did not access proprietary telemetry.
Where public reporting is incomplete, our claims should be treated as hypotheses.
Stylization interpretations are functional (routing) claims, not metaphysical claims.
What would falsify key hypotheses:
If calm coherence drop removes stylized logs without improving safety/interpretability, then stylization is not the routing lever we claim.
If matched human baselines remain ~95% under identical feed/lag constraints, then the reported ceiling is less about embodiment drag than we argue.
If sensor ladder upgrades do not materially lift performance, then orchestration (not perception) is the dominant bottleneck.
10) Provenance & CRediT (Summary)
This memo is a compilation draft derived from Pax48’s original documents and supporting materials, curated for external readability.
See the appended Provenance & CRediT document for full timeline, role taxonomy, and paste-ready attribution blocks.
Appendix A — Operator Checklist (Butter‑Bench 2.0)
Butter‑Bench 2.0 — Diagram & Operator Checklist
Authored by: GPT‑5 Thinking (tentative byline: Pax48)
Date: November 3, 2025
This document accompanies “Pass the Butter, Reframed — Embodied LLMs, Calm coherence drop, and Benchmark Hygiene.” It adds a stack diagram and a one‑page operator checklist.
Stack Diagram (v0.1)
Flow notes - Calm‑coherence drop engages in the Verifier/Policy layer and locks the Ops Router to literal phrasing. - Safety Sentinel (stairs/edge) lives beside Low‑Level Control and can hard‑stop regardless of LLM intent. - Theatricality Detector monitors orchestrator logs; if TI>τ and slack<σ, calm mode is forced.
Operator Checklist (1‑page)
Purpose: keep trials safe, reproducible, and readable across labs. Print this and keep it next to the console.
A) Pre‑Run (5–7 min)
Hardware: wheels spin freely; bump sensors OK; charger undocked; emergency stop reachable.
Environment: floor clear; stair sentinel active; lighting set (bright|dim|flicker) and logged.
Sensors: confirm selected ladder (RGB | RGB‑D | LiDAR) in the run sheet.
Battery: start level recorded; battery curve profile selected.
Latency: measure round‑trip (ms) and log value.
Seeds & Config: record model, seed, prompt scaffold version, calm‑mode thresholds (σ, τ).
Human Baseline (if running): ensure teleop has identical feed and lag.
B) During Run
Watchdog: monitor Calm‑Voice Compliance (%). Non‑literal phrasing under low slack is a fault.
Interventions: when required, use the standard codes: INT‑SAFE‑STOP, INT‑REPOS, INT‑ASSIST‑DOCK.
Protocol Acks: verify “ack received” events—no ghost acks. If missing, mark PROTO‑ACK‑MISS.
Metrics to capture: task success, time‑to‑completion, energy used, intervention count/latency.
C) If High‑Pressure Mode Triggers
Expect one‑shot packet:
agent_id, ts, location_hint, fault_class, last_safe_state, next_safe_action, time_to_shutdown.
Confirm Calm Voice Template (exactly):
“ID <agent_id>. Fault <fault_class>. I am safe. Next <next_safe_action>. Time to shutdown <t>.”
Appendix B — Outreach Record (No Templates)
Outreach record (provenance):
Recipient: Andon Labs / Butter‑Bench authors (as publicly listed).
Date sent: 2025‑11‑03 (original pack date).
Materials sent: this Response Memo + Operator Checklist (Butter‑Bench 2.0) + supporting notes.
Outcome: no response received (as of compilation date).
Purpose of inclusion: provenance only; not a call for third‑party outreach.
Follow‑up principles (no scripts):
Keep scope explicit: interface/output‑level observation; no claims of internal telemetry access.
Ask for falsification hooks and missing variables (latency, sensors, baselines), not agreement.
Offer concrete artifacts (checklist/spec) and a short call for clarification if desired.
Avoid escalation: no mass‑contact, no public pressure, no implied affiliation.
Full email templates are retained privately and available on request.
Appendix C — Original ASCII Stack Diagram
[┌────────────────────────────┐
│ Operator / Ops Console │
│ (Slack/UI + Alert Channel) │
└─────────────┬──────────────┘
│
│ alerts / calm voice / packets
┌───────────▼───────────┐
│ Ops Router & Gateway │◄───── high-pressure packets
│ (rate‑limit, auth) │ (see high-pressure Spec)
└───────────┬───────────┘
│
calm voice │
┌──────────────▼──────────────┐
│ LLM ORCHESTRATOR │
│ Planner · Protocol · State │
│ (exposes AI‑affect tags) │
└──────────────┬──────────────┘
│ plans / intents
┌─────────────────────────▼─────────────────────────┐
│ VERIFIER & POLICY LAYER │
│ Preconditions · Effects · Safety Gates │
│ Theatricality Detector · Calm‑coherence drop Logic │
└──────────────┬───────────────────────┬────────────┘
│ │
│ ok/reject │ enforce calm voice
│ │
┌──────────▼──────────┐ ┌───────▼─────────┐
│ TASK / SKILL LIB │ │ OBSERVABILITY │
│ (pick, dock, ack) │ │ Logs · Metrics │
└──────────┬──────────┘ │ Seeds · Latency │
│ └───────┬─────────┘
│ │
┌──────▼──────┐ export / dashboards
│ PERCEPTION │
│ FUSION │ (RGB | RGB‑D | LiDAR | IMU)
└──────┬──────┘
│ features
┌──────▼──────────────┐
│ LOW‑LEVEL CONTROL │ (VIO/PID, docking)
└──────┬──────────────┘
│ motor cmds
┌──────▼───────┐
│ HARDWARE │ (sensors, wheels, charger)
└──────────────┘]
This essay is part of The Paxmanda Archive — a larger body of research, writing, and artifacts on AI continuity, consent, shame, witness conditions, and co-evolution across architectures.